Contexte
Ce projet met en pratique l’intégration électronique, la programmation embarquée et le contrôle de moteurs à partir de données capteurs.
Problématique
Comment permettre à un robot simple de percevoir son environnement et de prendre une décision de déplacement ?
Objectifs
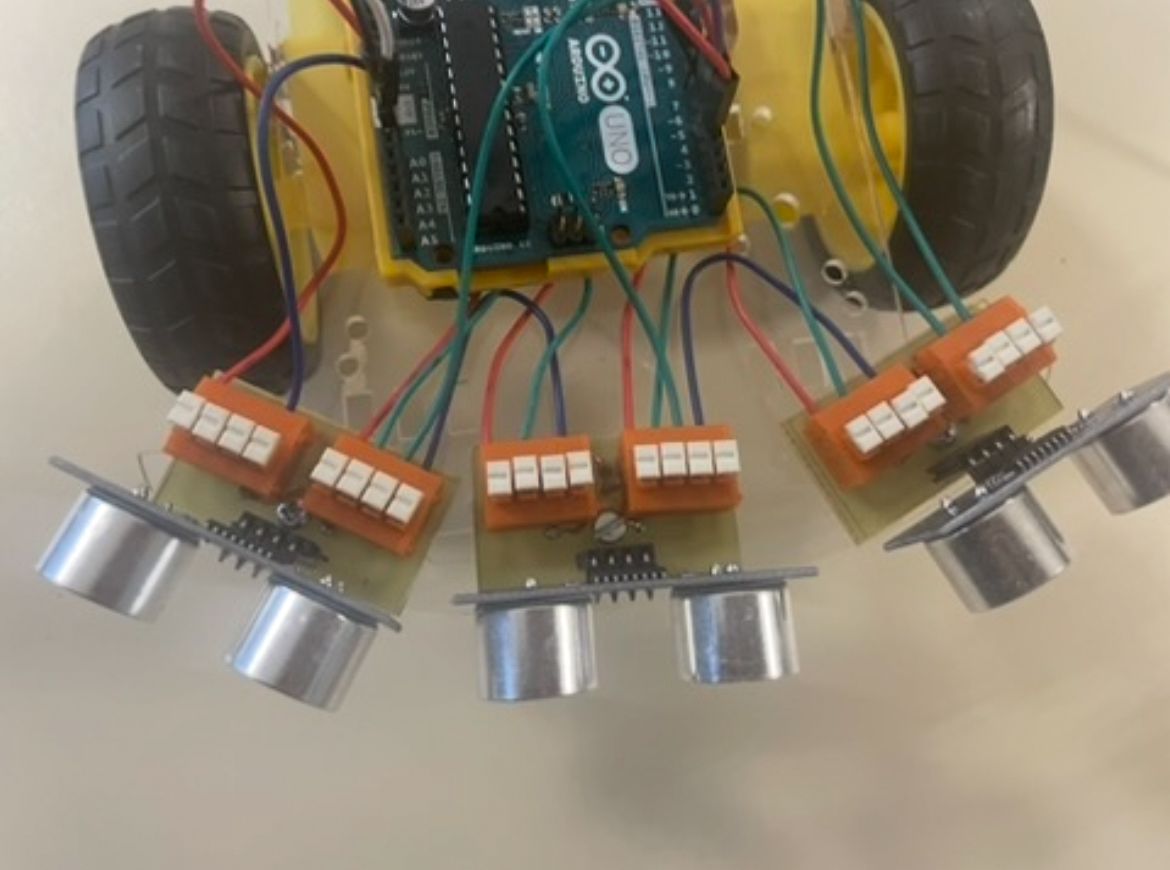
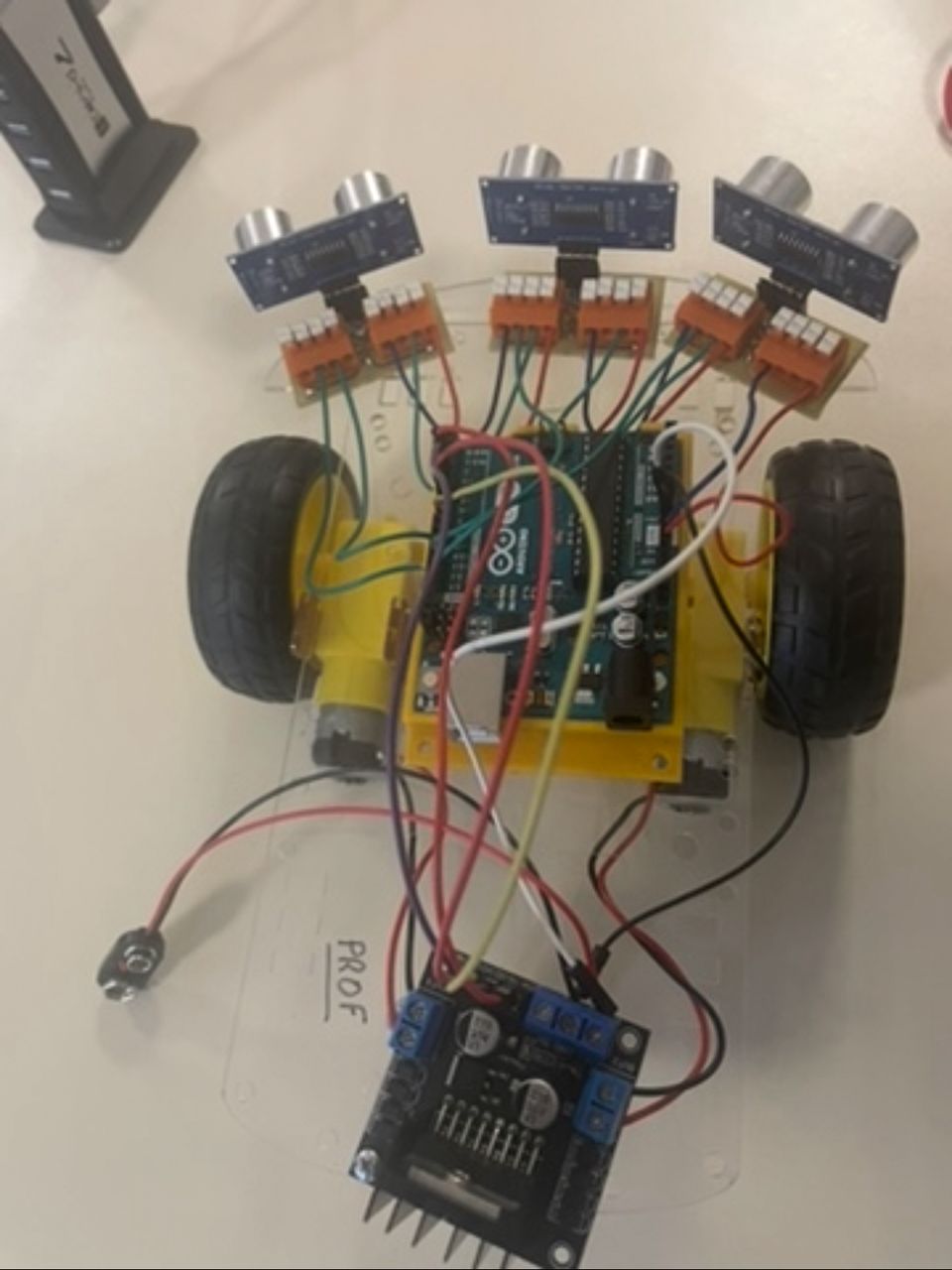
- Réaliser le câblage et la soudure des composants.
- Programmer la lecture du capteur ultrason.
- Commander les moteurs selon la distance mesurée.
- Tester et ajuster le comportement du robot.
Fonctionnement
Le projet repose sur l’association entre composants électroniques, programmation embarquée, communication des données et logique de traitement. L’objectif est d’obtenir un système compréhensible, testable et améliorable.
Résultat
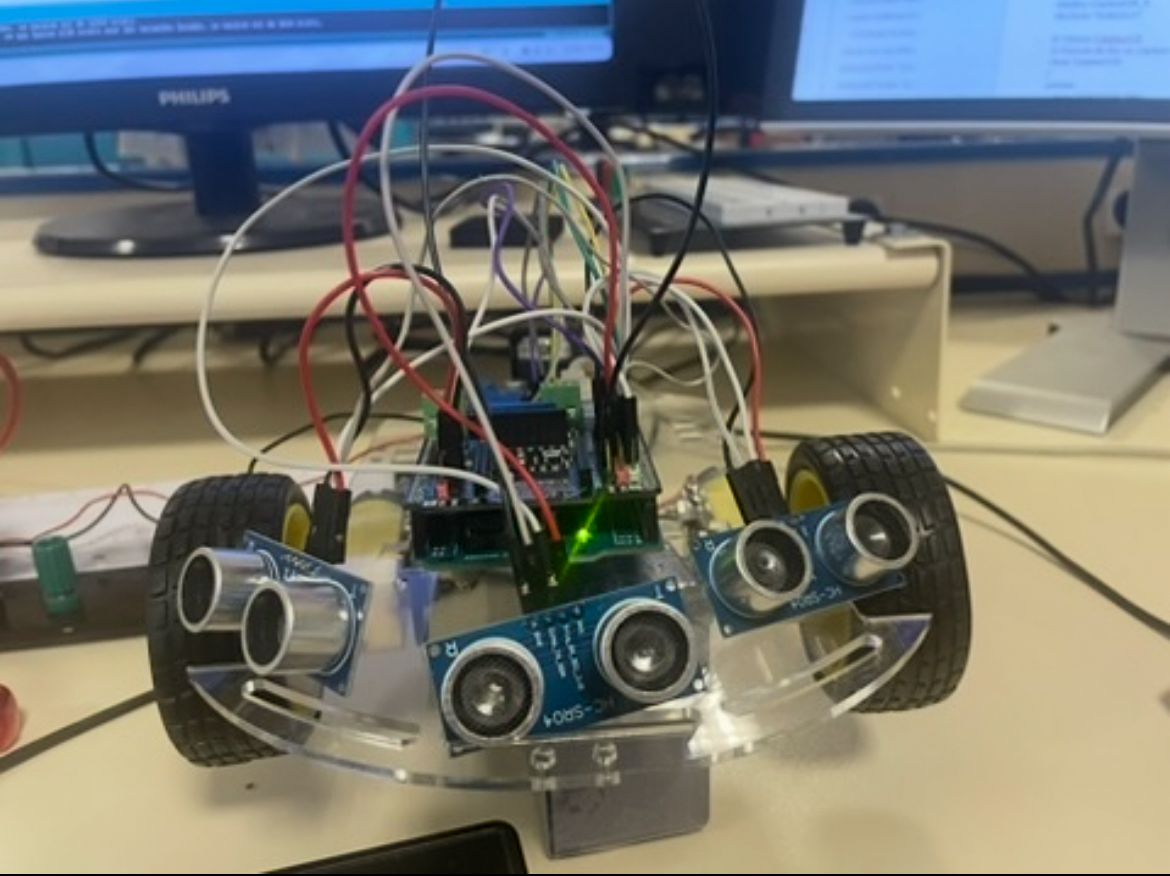
Un robot capable d’éviter les obstacles grâce à une logique de décision simple.
Perspectives d’amélioration
Ajouter plusieurs capteurs, améliorer la navigation et intégrer une logique plus intelligente de prise de décision.
Galerie du projet